クレファスの学び
クレファス独自のワークシートから学ぶ”原理原則”

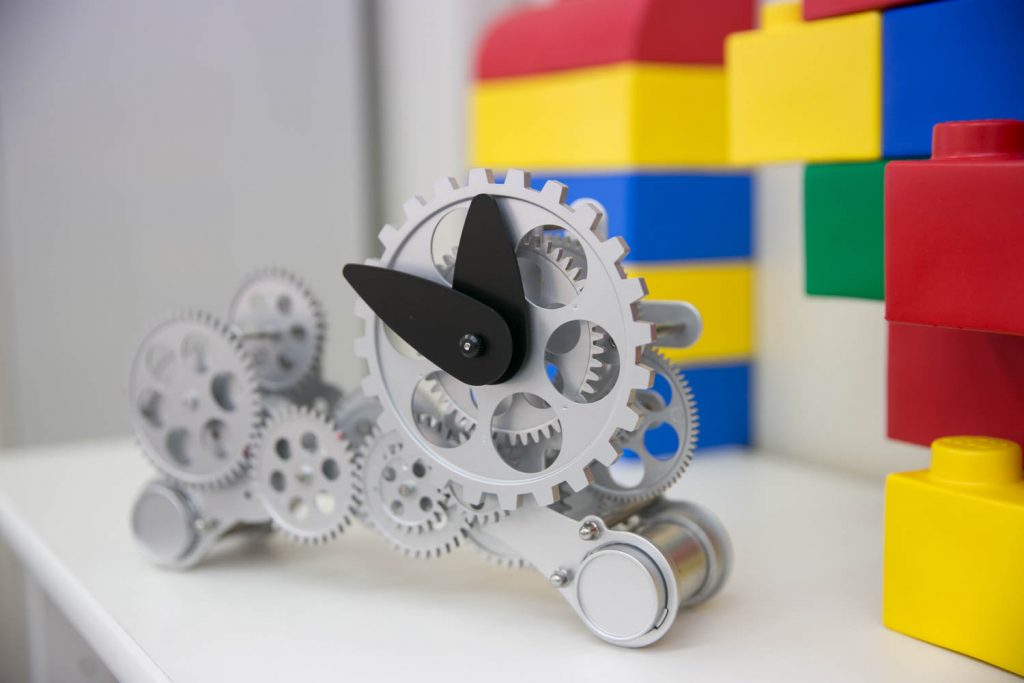
クレファスと他教室との違いの一つに、ワークシートがあります。 ただロボットを作って動かすだけでなく、ワークシートの中には生物・社会の仕組み・物理などの要素、ロボット作りに必要な原理原則が学年を超えてたくさん盛り込まれ、子ども達の興味関心を広く促しています。 例えば滑車。学校では中学3年生の授業で習いますが、クレファスではキックスコースのワニ、クレファスコース3年生のクレーンロボットに盛り込まれ、滑車が目の前で動く仕組みとして学びます。 ワークシートは各コース共、早稲田大学高西教授の監修の元、毎年より良くなるよう更新されています。
※ワークシートの内容は無料体験説明会で詳しくご紹介しています。 またCrefus(クレファス)のホームページでもカリキュラムを含めてご案内しております。 2年生で学ぶ”ワニ”のページには、ワニの種別は何?ワニが住んでいるのは世界のどの地域?どんな環境?など、ワニのロボットを作るだけではなく、ワニの生態までも世界地図を見ながら勉強します。 ワニの他にも、魚やカエル、ライオン、トリ。発表会ではそれぞれのロボットを動かすことに加え、生態や仕組みのクイズが出されます。
2年生で学ぶ”ワニ”のページには、ワニの種別は何?ワニが住んでいるのは世界のどの地域?どんな環境?など、ワニのロボットを作るだけではなく、ワニの生態までも世界地図を見ながら勉強します。 ワニの他にも、魚やカエル、ライオン、トリ。発表会ではそれぞれのロボットを動かすことに加え、生態や仕組みのクイズが出されます。発表会でのプレゼンテーションで育む”表現力”
キックスコースは年1回、クレファスコースは年2回の発表会があります。 発表会では自分が作ったロボットやプログラムについてポスターを作りまたはパワーポイントを使ってまとめます。自分を客観視し考えをまとめる作業です。 そして保護者の前で発表し、お友達からの質問に答えます。また、逆にお友達の発表を聞いてお友達のロボットに感心し質問をします。 他者を認め自分も認める、学校教育ではなかなか育む機会のないこの ”表現力” は、グローバル競争力をつけるためには必須な力です。

アクティブラーニングで育む”主体的・能動的に取り組む力”

世界最大のロボット大会”FLL(First LEGO League)”では毎年社会的なテーマが与えられます。 そのテーマの中から問題点を見つけ解決策を見つけ、それをモデルやポスターに具現化する作業の中で、仲間との協働、社会への興味関心を養います。 また、専門家から直接話を聞くこともします。自分たちで考えたたくさんの質問を直接ぶつけると、専門家の方もとっても丁寧に根気強く、子ども達に向き合ってくれます。これがアクティブラーニングです。 大学入試改革で今後世の中で求められていくのは、基礎学力だけでなく、主体的・能動的に取り組み、積み重ねた経験です。
プログラミングの考え方、”論理的思考力”
論理的思考力とは、筋道を立てて考える力。
ビジネスでも国際競争力をつけるために、もはや必須と言っても過言ではないこの力、ロボットを動かすプログラミングを考える時にも要求されます。
条件分岐プログラムを作るとき、まず必ず樹形図を書きます。最初は面倒なこの作業ですが、書くことで、ロボットのケースバイケースの動きが頭の中で整理されていきます。 センサーを2つ以上のロボットにつけた時、Aが反応してBも反応した時、Aが反応してBは反応しない時、Aが反応しなくてBが反応した時、AもBも反応しない時…。 課題をクリアするにはどんな動きをさせればいいのか。またプログラム通りにロボットが動かない時、まず何から原因を探ればいいか、どんな要素が考えられるか。このことから、ロボットは今どんな状況にあると考えられるのか。
次に何をすればいいのか、確たる成功をつかむまで根気と発想の連続が続きます。 論理的に物事を整理し、組み立てていく経験の積み重ね・習慣は、知らない間に子供たちの大きな強みとなるでしょう。

三次元方向を素早く理解する”空間認識力”


空間認識力とは、モノの所在地方向・距離・大きさなど物体が三次元方向に占めている状態や関係を、素早く把握、認識する力のことです。空間認識力は、主に右脳によってコントロールされています。
例えば、高校入試で出題された「地図を見ながら道案内することを想定した文を書きなさい」という問いに、意外と答えられない子どもが多いようです。
地図の説明に必要な力は(1)論理的に説明する能力、(2)空間認識力、の2つです。 クレファスでは当然鍛えられているこの力。 空間認識力の高い子どもは2Dから3Dを想像できるし、逆に3Dを2Dに落とし込むこともできます。「自由に作らせたい、自由に作ることが好き」とおっしゃる保護者の方は沢山いらっしゃいますが、クレファスでは、パソコンの画面で組み立て書を見ながらロボットを組み立て、自分なりの改良を加えていきます。年間42回というたくさんの継続した授業の積み重ねで数学にも必要な空間認識力を鍛えていくのです。
 組み立て書の読み方を間違えると、70工程まで終えてもロボットが動かないことがあります。子ども達は組み立て書を遡って、間違えたポイントを発見します。パーツの向きや付ける場所の違い、パーツの見落とし等。 出来上がったロボットは改良タイムに、自分なりのロボットへと進化させていきます。一人として同じロボットは、ありません。
組み立て書の読み方を間違えると、70工程まで終えてもロボットが動かないことがあります。子ども達は組み立て書を遡って、間違えたポイントを発見します。パーツの向きや付ける場所の違い、パーツの見落とし等。 出来上がったロボットは改良タイムに、自分なりのロボットへと進化させていきます。一人として同じロボットは、ありません。クレファスの習慣が子どもたちを育む
習慣は知らず知らずに私たちの行動・思考傾向まで影響しています。 イギリスの詩人ジョンドライデンの言葉にもある「初めは人が習慣を作り、それから習慣が人を作る」。 グローバルに活躍する未来のために、クレファスにはたくさんの習慣があります。
整理整頓の習慣 – ソーティング

ソーティングとは、たくさんのパーツを分類しあるべき場所に片づけること。 第1回目の授業ではソーティングの意味を学びます。 クレファスの子どもたちに「なぜソーティングするの?」と質問をすると、「ロボットを作るときにパーツがすぐ見つかって、早くロボット作れるから!」とすぐに答えが返ってきます。 将来、仕事をする上でも大切な整理整頓の習慣です。
継続して挑戦し続ける習慣 – PDCA
| Plan(プラン) | 今日の目標を自分で決める |
|---|---|
| Do(ドゥ) | 自分からワークシートの課題に取り組みロボットを作りプログラミングして動かす |
| Check(チェック) | 課題をクリアするための方法がこれでいいのか確かめる、また、自分の目標に対して今日はどのくらい頑張ったのか振り返る |
| Action(アクション) | うまくいかなかったことに対して改善しうまくいくまでチャレンジする |

研究者同様のPDCAの繰り返しによって、うまくいかないことに果敢に挑戦していく忍耐力・持久力をつけていきます。 年間42回という他教室にはないたくさんの継続した授業を積み重ねることが出来るのは、クレファスだけです。
たくさんの子ども達にクレファスの習慣と学びを
現在、プログラミングと言ってもアニメやゲームを作ったりと様々です。 ロボットを作りプログラミングすることは、VR(バーチャルリアリテイ)とリアル(現実)を繋ぐことを意味しています。 理論上では思い通りになるプログラムも、現実世界に落とし込むとうまくいかない…想定外の困難に立ち向かいながら解決していくのです。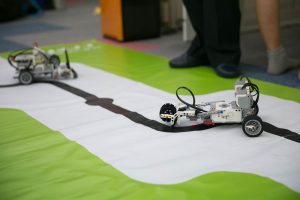 相手陣地に早く移動し、ぶつかったら相手を押し出す競技です。 子ども達は最強のロボットを作るにはどうしたらいいか必死に考えます。基本プログラムのままではスピードが出ない。プログラムのパワーバランスをどうしたら スピード・トルクが出るのか、閾値は合わせたかベースロボットのままでは ぶつかっても相手をひっくり返せないどんなパーツをどこにどのようにつけていったらいいか。カラーセンサーの位置、高さ、向きのベストポイントはどこか。何度も戦っては改良を繰り返すのです。
相手陣地に早く移動し、ぶつかったら相手を押し出す競技です。 子ども達は最強のロボットを作るにはどうしたらいいか必死に考えます。基本プログラムのままではスピードが出ない。プログラムのパワーバランスをどうしたら スピード・トルクが出るのか、閾値は合わせたかベースロボットのままでは ぶつかっても相手をひっくり返せないどんなパーツをどこにどのようにつけていったらいいか。カラーセンサーの位置、高さ、向きのベストポイントはどこか。何度も戦っては改良を繰り返すのです。ひたちなか校の理念/ひたちなか校とは!こんな教室です!
ひたちなか校の理念は、「解き放つ」。
子ども達の未知なる智力を解き放て!未知なる自分が溢れ出す! クレファスという空間で自ら取り組むハンズオンが、マインズオンとなり、ひらめきや智力を引き出せるのが理想と考えています。